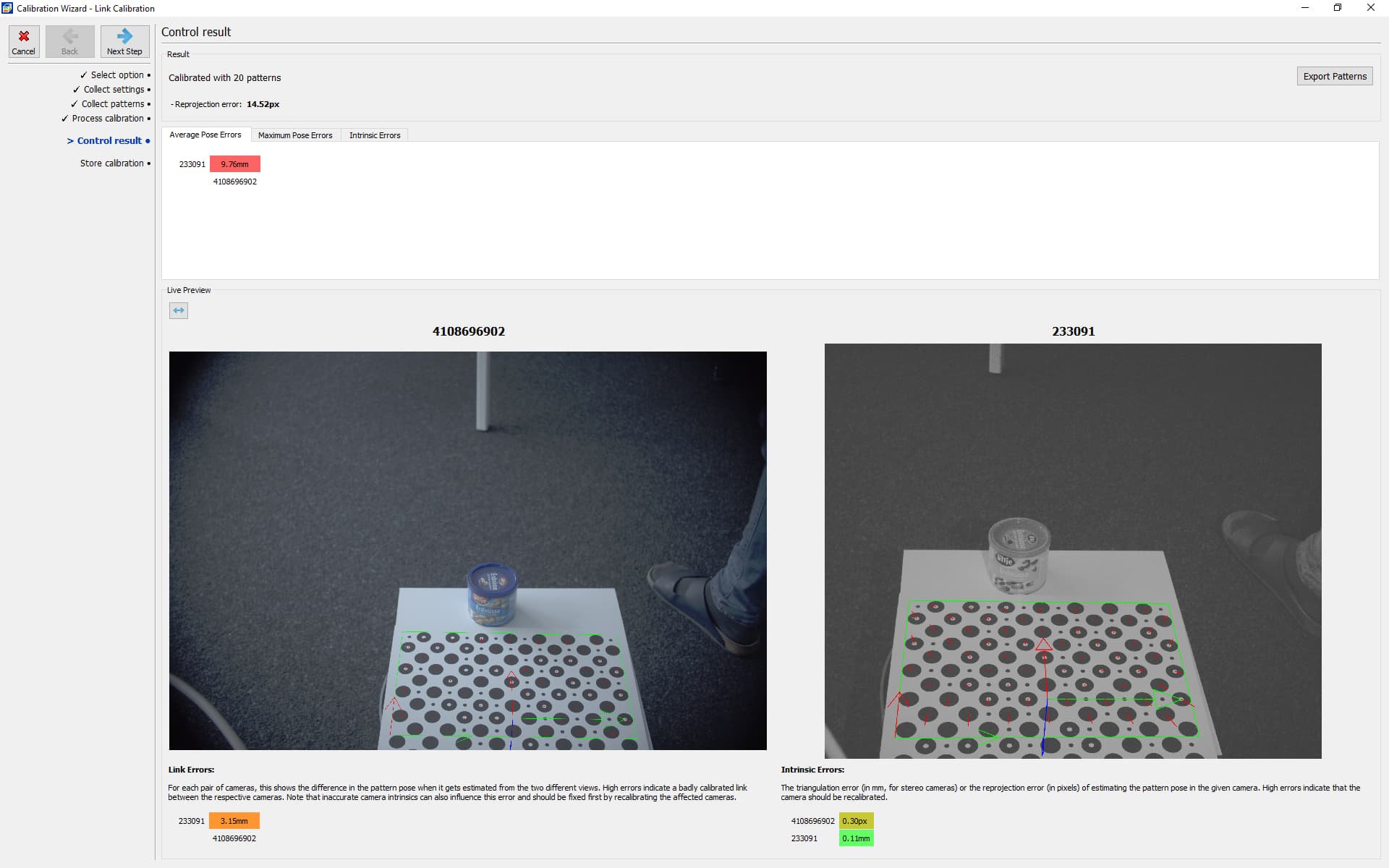
I’m back on my C-series setup now and we needed a bit more color resolution than the internal color sensor of the C can deliver. So we bundled a 20MP GV-5800-FA-C on top of the stereo camera. Now I faced two different issues:
the calibration resulted in a rather large error of ~9mm, even though I set the calibration wizard to hardware triggered
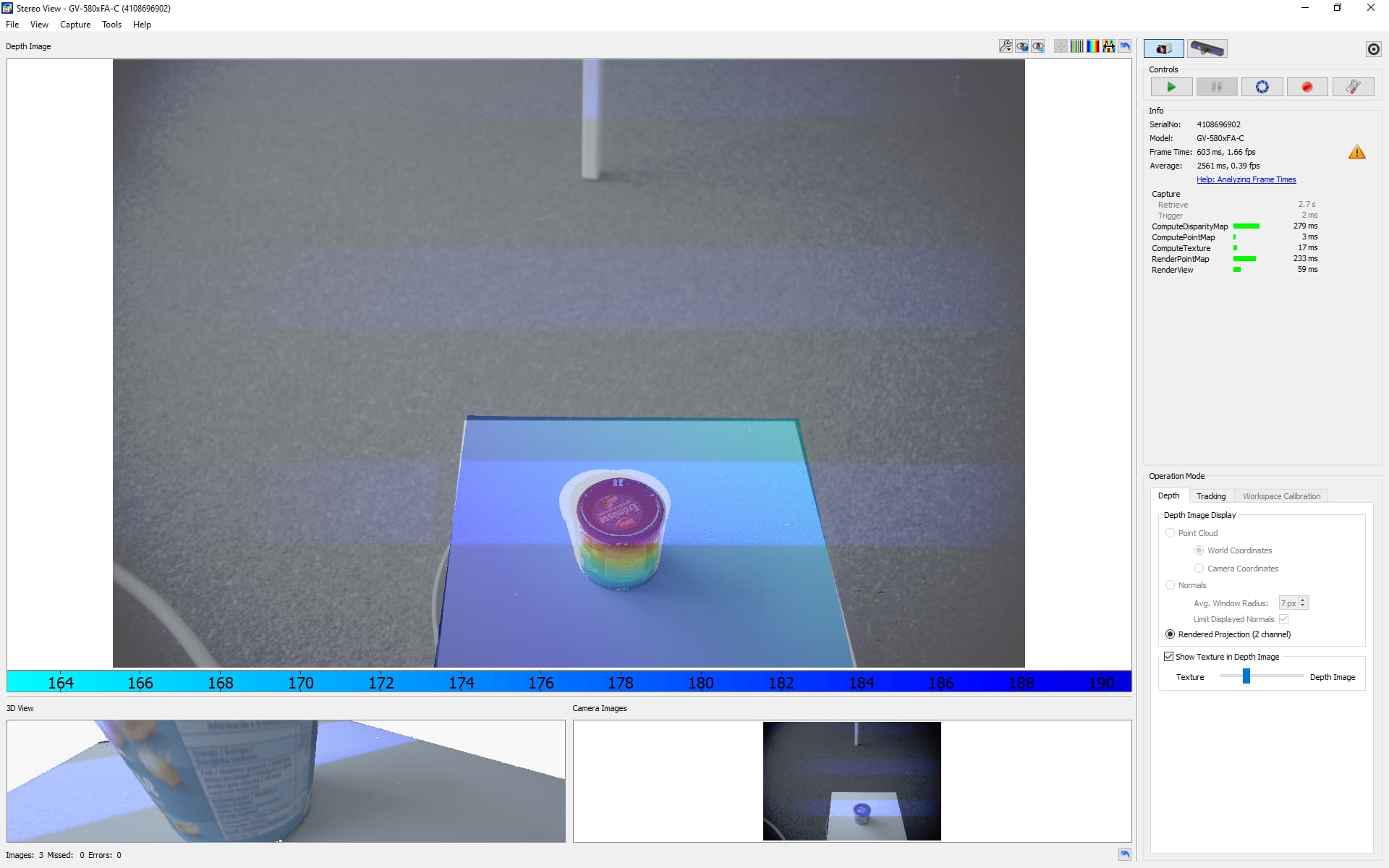
I can’t seem to get rid of the projection pattern in the color camera. I always see blue stripes in them, regardless of what I set as edge in the IO-settings of both devices
For the calibration unfortunately I couldn’t use the ‘ignore moving patterns’ option, because it was simply way too strict to hold the pattern manually.
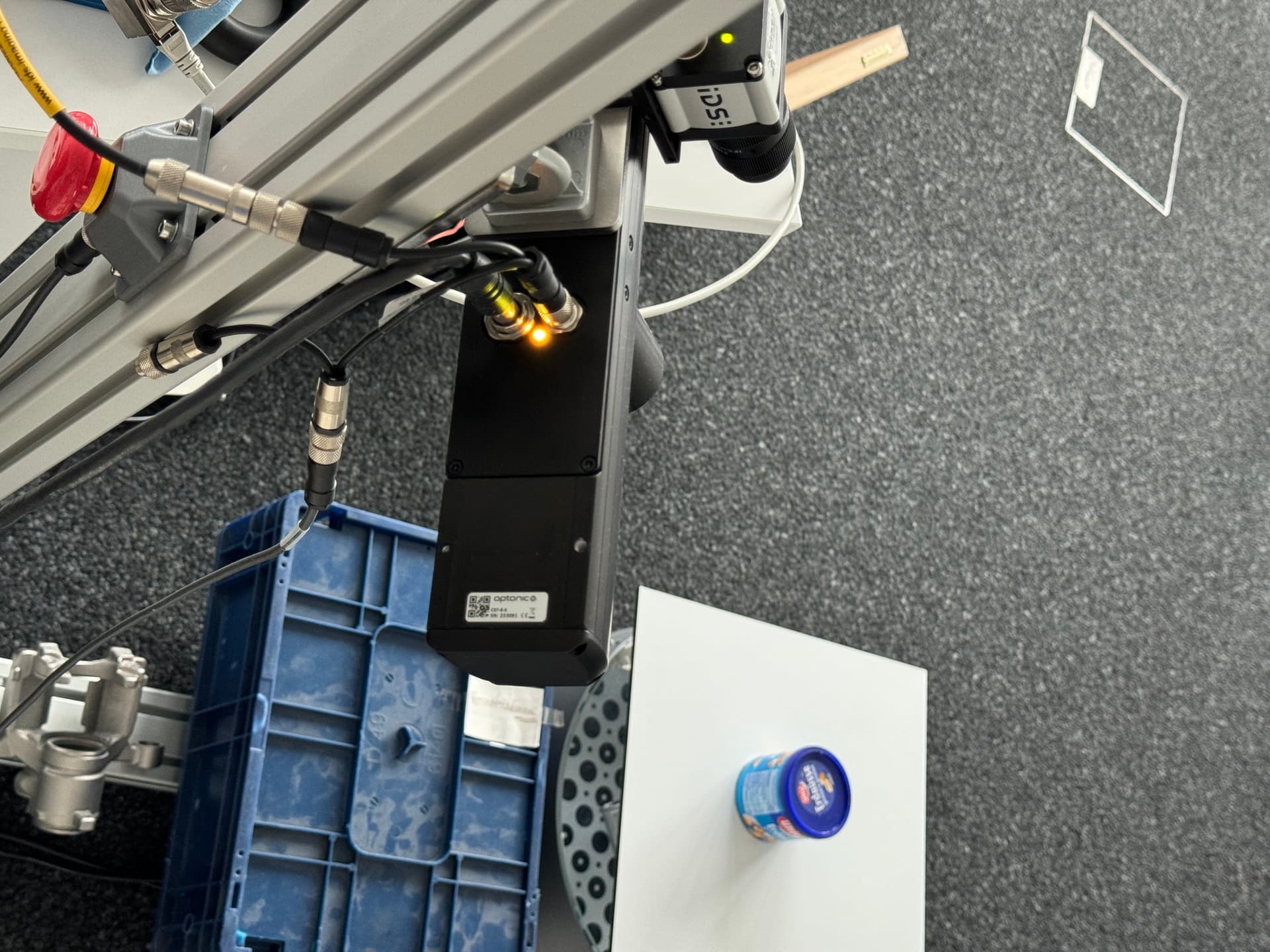
The cameras are simply connected using the M8-Binder Adapter and Universal sync adapter. The triggering seems to work electrically, as far as I could test. When I disable the flash output on the C-series I get capture timeouts on the color camera, when enabling it back it works.
Regarding your first issue: yes, the calibration of rolling shutter cameras is indeed difficult to get accurate. Maybe you can calibrate using the motion filter and put the calibration plate on the floor in different positions to have it really steady? You might get better results, even when using just a few patterns, instead of using moving ones.
For the second problem: could you enable the flash output on the color camera instead of the stereo device? The stereo device will output a flash signal for every flex view frame. When you just enable the output of the monocular camera this will only give you a single rising-edge as soon as the color exposure starts. And this will likely be the right time for the external camera to start exposing as well.
Ok, regarding the calibration you might be right: I just found a frightening sentence in the application note for the color camera:
The individual trigger delay cannot be read out at present.
If there is a relevant trigger delay in the external camera this would also explain why I’m not seeing the white light flash in the external camera after enabling flash output from the C-series color subdevice.
I will be on holiday next week, but will investigate this further afterwards, and probably also need to follow up with IDS support to clarify the expected delay of the GV-5800…
Small update here after feedback from IDS support: seems like the GV5800 cannot really be triggered externally, at least not with any reasonable delay. We will have to rework the whole trigger setup in the machine to make the color camera trigger master and the stereo camera the slave, then it should work. I’ll post back.