General Information
- Product: X36-2CP
- Serial Number: 229093
- Ensenso SDK Version: 4.1.1033
- Operating System: Ubuntu 24.04 LTS
- ROS2 Jazzy
Problem / Question
Hi,
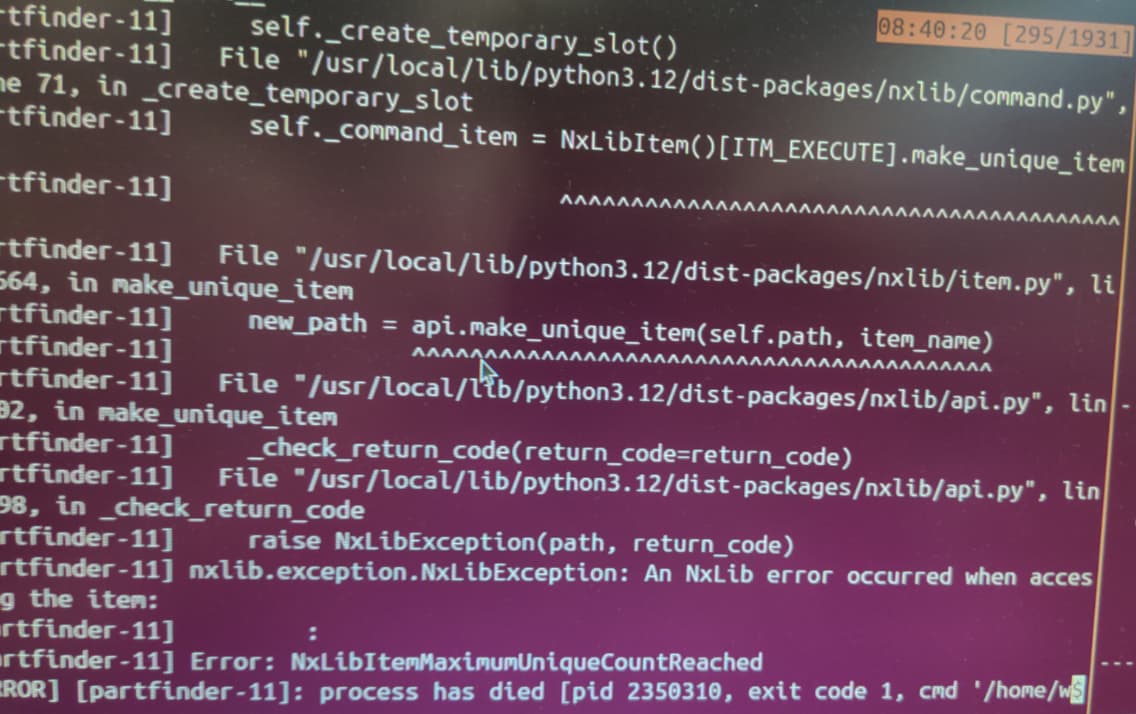
we are encountering an issue with a ROS2 node, where we are using the python API for calling PartFinder. It seems that during each computation cycle temporary command slots are continuously added until maximum unique count is reached. At that point the following exception occurs:
According to the changelog, this issue should have been fixed in version 3.4.743. So we are wondering, what are we doing wrong?
We are using the NxLibRemote class to interact with the remote NxLib instance (in this case a ROS2 node which initalizes the camera and capture images similar to: ros_driver/ensenso_camera/scripts/request_data at master · ensenso/ros_driver
Each call to NxLibCommand within a context manager seems to add an temporary slot:


Any suggestions would be greatly appreciated.
Thanks in advance!